

1231
Shields et Modules / Carte Servomoteurs DCC + CAN
« le: janvier 14, 2016, 06:12:22 pm »
Bonsoir,
J'ai été hors course ces derniers temps mais je ne suis pas resté complètement inactif.
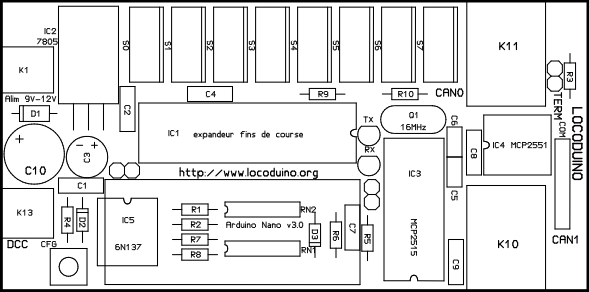
Voici donc une carte destinée à piloter 8 servomoteurs et raccordable au bus DCC et au bus CAN.
La carte comporte
- une alimentation pour les servos (un 7805, certains modèles délivrent 1,5A)
- un Arduino Nano
- un contrôleur CAN et un transceiver
- une interface DCC
- 2 connecteur RJ11 pour le CAN
- un bornier pour le DCC
- un bornier pour l'alim 9 à 12V
- 8 connecteurs pour les servos
- optionnellement un expandeur d'I/O pour lire des fins de course
- J'ai casé un détecteur de coupure d'alim pour la sauvegarde en EEPROM
J'ai réussi à tout faire tenir sur une carte 10x5 cm
Voici les schémas : http://www.locoduino.org/pic/carteServoCANDCC/schematique.pdf
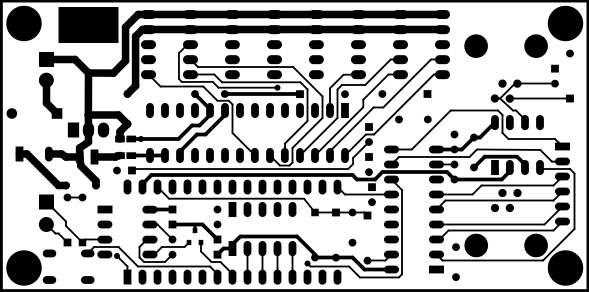
Les typons :
Recto
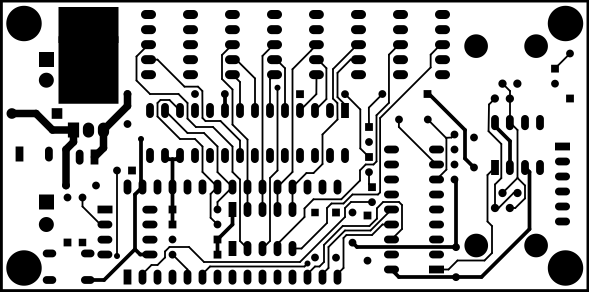
Verso
Le logiciel reste à faire. Il se basera sur SlowMotionServo
J'ai été hors course ces derniers temps mais je ne suis pas resté complètement inactif.
Voici donc une carte destinée à piloter 8 servomoteurs et raccordable au bus DCC et au bus CAN.
La carte comporte
- une alimentation pour les servos (un 7805, certains modèles délivrent 1,5A)
- un Arduino Nano
- un contrôleur CAN et un transceiver
- une interface DCC
- 2 connecteur RJ11 pour le CAN
- un bornier pour le DCC
- un bornier pour l'alim 9 à 12V
- 8 connecteurs pour les servos
- optionnellement un expandeur d'I/O pour lire des fins de course
- J'ai casé un détecteur de coupure d'alim pour la sauvegarde en EEPROM
J'ai réussi à tout faire tenir sur une carte 10x5 cm
Voici les schémas : http://www.locoduino.org/pic/carteServoCANDCC/schematique.pdf
Les typons :
Recto
Verso
Le logiciel reste à faire. Il se basera sur SlowMotionServo