Comme la carte centrale sait où sont les trains, on peut peut-être envisager que la carte centrale envoie l'info (DCC/analogique) au canton précédent, alors qu'il est vide ?
Il y a une grande partie de la carte canton qui est commune :
Même en DCC, il faut inverser le sens des rails (par exemple en sortie de boucle).
Il faut bien détecter la présence des trains.
Enfin, si c'est trop dur, on peut faire des sessions DCC puis des sessions analogiques distinctes. C'est déjà pas mal.
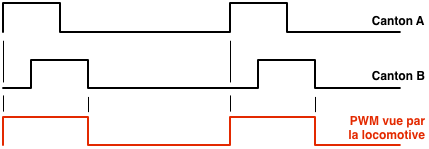
Malheureusement ça ne peut pas marcher. Si tu examines les schémas de la carte traction que je t'ai envoyé, tu verras qu'en DCC, la diode roue libre court-circuite le signal DCC sur une 1/2 alternance.
Il faudrait un moyen de mettre cette diode hors-circuit mais ça rajoute de la complexité sur cette carte qui n'en a pas besoin.
Pour moi, soit tu fais du numérique, soit tu fais de l'analogique. Vouloir faire les deux avec la même électronique, c'est aller dans le mur : plus coûteux, plus complexe => marche jamais.
Donc je préfère faire moins mais le faire bien.
Au pire, quelqu'un voulant faire un réseau qui fait les deux peut intercaler un relai entre les alim traction et les rails afin de les déconnecter et ajouter des détections séparées pour le DCC qui seraient également déconnectées sur la condition inverse. Ça fait un peu de matériel en plus mais seul celui qui veut fromage ET dessert le paye et se débrouille avec




 . Le readme est également celui d'UAD
. Le readme est également celui d'UAD