Bonjour à tous,
Il n’aura certainement pas échappé à ceux qui se sont intéressés à DCC++ que ce dernier permettait de communiquer par
Ethernet en plus de la traditionnelle liaison série. L’un des nombreux points forts de DCC++ est qu’il fonctionne avec l’envoi de simples messages textuels structurés et ça fonctionne !
Dans ce post, je vais décrire comment paramétrer les réglages Ethernet et vous trouverez également en fin en téléchargement un petit "controller" pour piloter DCC++ avec un navigateur web ou pourquoi pas votre tablette ou votre smartphone en wifi

DCC++ Base Station utilise les mêmes messages en communication série ou Ethernet. Ces messages qui sont en fait des commandes, sont envoyés au programme et doivent être placés entre ‘
<’ et ‘
>’. Ce que vous mettrez avant ‘
<’ ou après ‘
>’ sera ignoré par DCC++. Pour plus de détails sur les commandes :
https://github.com/DccPlusPlus/BaseStation/wiki/Commands-for-DCCpp-BaseStationCette précision est importante car en communication Ethernet avec le protocole HTTP on envoie plus que cela et ce sont les ‘<’ et ‘>’ qui vont permettre d’identifier la commande à l’intérieur de tout le texte des requêtes.
Pour utiliser Ethernet vous devrez bien sûr disposer d’un
Arduino MEGA (les autres ne sont pas supportés) d’un
shield Ethernet. Pour le reste vous n’avez pratiquement besoin que de votre ordinateur et d’un réseau Ethernet « domestique » qui est fourni par votre box.
Dans DCC++, c’est dans le fichier
Config.h que l’on sélectionne la communication par Ethernet. Ligne 34 : #define COMM_INTERFACE à 1,2 ou 3 selon votre shield.
// DEFINE COMMUNICATIONS INTERFACE
//
// 0 = Built-in Serial Port
// 1 = Arduino.cc Ethernet/SD-Card Shield
// 2 = Arduino.org Ethernet/SD-Card Shield
// 3 = Seeed Studio Ethernet/SD-Card Shield W5200
#define COMM_INTERFACE 1
Il faudra également décommenter la ligne 41 : #define IP_ADDRESS { 192, 168, 1, 200 }
// DEFINE STATIC IP ADDRESS *OR* COMMENT OUT TO USE DHCP
//
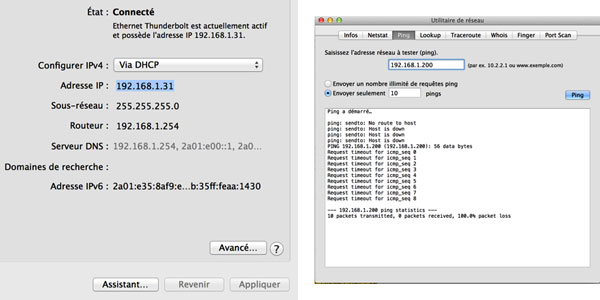
#define IP_ADDRESS { 192, 168, 1, 200 }Mais auparavant on va tout de même s’assurer que cette adresse IP 192.168.1.200 peut « s’insérer » dans votre réseau domestique. Sur Mac, ces informations sont disponibles dans « Préférences Système » -> Réseau.
Sur mon ordinateur, l’adresse IP est 192.168.1.31 ce qui veut dire que toutes les adresse IP de mon réseau domestique vont de 192.168.1.1 à 192.168.1.254, et que mon Arduino + Ethernet devrait pouvoir trouver sa place à l’intérieur avec l'adresse IP 192.168.1.200.
Pour ceux qui maîtrisent un peu plus ces questions, faites un PING en Mac avec « Utilitaire de réseau »
Sur PC, c'est ->
démarrer / exécuter / cmd/k ipconfig /all (je crois).
Dans le fichier confi.h, laissez le port HTTP tel qu’il est configuré à 2560. Voilà donc à quoi devrait ressembler notre code dans Config.h
Config.h
COPYRIGHT (c) 2013-2016 Gregg E. Berman
Part of DCC++ BASE STATION for the Arduino
**********************************************************************/
/////////////////////////////////////////////////////////////////////////////////////
//
// DEFINE MOTOR_SHIELD_TYPE ACCORDING TO THE FOLLOWING TABLE:
//
// 0 = ARDUINO MOTOR SHIELD (MAX 18V/2A PER CHANNEL)
// 1 = POLOLU MC33926 MOTOR SHIELD (MAX 28V/3A PER CHANNEL)
#define MOTOR_SHIELD_TYPE 0
/////////////////////////////////////////////////////////////////////////////////////
//
// DEFINE NUMBER OF MAIN TRACK REGISTER
#define MAX_MAIN_REGISTERS 12
/////////////////////////////////////////////////////////////////////////////////////
//
// DEFINE COMMUNICATIONS INTERFACE
//
// 0 = Built-in Serial Port
// 1 = Arduino.cc Ethernet/SD-Card Shield
// 2 = Arduino.org Ethernet/SD-Card Shield
// 3 = Seeed Studio Ethernet/SD-Card Shield W5200
#define COMM_INTERFACE 1
/////////////////////////////////////////////////////////////////////////////////////
//
// DEFINE STATIC IP ADDRESS *OR* COMMENT OUT TO USE DHCP
//
#define IP_ADDRESS { 192, 168, 1, 200 }
/////////////////////////////////////////////////////////////////////////////////////
//
// DEFINE PORT TO USE FOR ETHERNET COMMUNICATIONS INTERFACE
//
#define ETHERNET_PORT 2560
/////////////////////////////////////////////////////////////////////////////////////
//
// DEFINE MAC ADDRESS ARRAY FOR ETHERNET COMMUNICATIONS INTERFACE
//
#define MAC_ADDRESS { 0xDE, 0xAD, 0xBE, 0xEF, 0xFE, 0xEF }
/////////////////////////////////////////////////////////////////////////////////////
ATTENTION : Il manque quelques lignes de code dans DCC++ Base Station qui utilise la bibliothèque Ethernet de l’Arduino. Dans le fichier
SerialCommand.cpp il faudra ajouter à la ligne 66 :
INTERFACE.println("HTTP/1.1 200 OK");
INTERFACE.println("Content-Type: text/html");
INTERFACE.println("Access-Control-Allow-Origin: *");
INTERFACE.println("Connection: close");
INTERFACE.println();
et entre les lignes 73 et 74 (qui seront devenues 80 et 81)
client.stop();
Code complet :
#elif COMM_TYPE == 1
EthernetClient client=INTERFACE.available();
if(client){
INTERFACE.println("HTTP/1.1 200 OK");
INTERFACE.println("Content-Type: text/html");
INTERFACE.println("Access-Control-Allow-Origin: *");
INTERFACE.println("Connection: close");
INTERFACE.println();
while(client.connected() && client.available()){ // while there is data on the network
c=client.read();
if(c=='<') // start of new command
sprintf(commandString,"");
else if(c=='>') // end of new command
parse(commandString);
else if(strlen(commandString)<MAX_COMMAND_LENGTH) // if comandString still has space, append character just read from network
sprintf(commandString,"%s%c",commandString,c); // otherwise, character is ignored (but continue to look for '<' or '>')
} // while
client.stop();
}
#endif
Le code étant le même pour COMM_TYPE == 0 (communication série) assurez vous que vous l’avez bien recopié dans #elif COMM_TYPE == 1
Voilà pour la programmation de la carte. Si vous uploadez, vous devez avoir un message de ce type dans le moniteur série de l’IDE avec l’adresse IP en fin :
<iDCC++ BASE STATION FOR ARDUINO MEGA / ARDUINO MOTOR SHIELD: V-1.2.1+ / Aug 22 2016 15:52:06><N1: 192.168.1.200>
Une précision toute bête mais assurez-vous que votre shield Ethernet est bien relié à votre box par un câble RJ 45 ! Vous pourrez faire un nouveau ping toujours sur cette adresse 192.168.1.200 qui doit maintenant s’afficher.
Voilà pour la carte. Votre Arduino c’est transformé en petit serveur web qui va répondre aux requêtes HTTP sur son adresse IP.
La partie "client", c'est le Mini Controller DCC++ que vous allez trouver en fin de ce post. Mais pour que cette application fonctionne, il nous faut
disposer d'un serveur web qui soit interne à notre réseau domestique et qui va héberger nos pages HTML, pages de programmation, feuilles de style et images.
Vous pouvez tout a fait utiliser votre box par exemple si elle fait serveur web ou si vous avez déjà un serveur web interne à votre domicile. Mais nous allons ici choisir d’installer ce serveur web sur notre propre ordinateur et pour cela, nous allons télécharger puis installer un logiciel gratuit mais très puissant qui est à la fois un serveur web, un serveur SQL et capable d’exécuter des scripts PHP (nous en aurons besoin assez rapidement quand notre application prendra de l’importance).
Ce logiciel s’appelle MAMP dans sa version Mac, WAMP dans sa version PC et XAMPP sous Linux. Choisissez la version gratuite largement suffisante. Voici les liens de téléchargement :
Mac :
https://www.mamp.info/en/PC :
http://www.wampserver.com/Linux :
https://www.apachefriends.org/fr/download.htmlNormalement, l’installation ne doit vous poser aucun problème car elle est vraiment très simple. Au besoin, consultez le tuto sur
OpenClassroomsSur votre ordinateur, vous devez déterminer un répertoire bien précis qui va être l’espace disque réservé pour votre serveur web. Choisissez par exemple de le « ranger » dans «
Mes documents/mon_petit_train/dossier_web ».
Lancez maintenant l’application MAMP (ou WAMP, ou XAMPP) qui ouvre normalement automatiquement le serveur web et le serveur mySql, (cases en haut à droite de couleur verte).
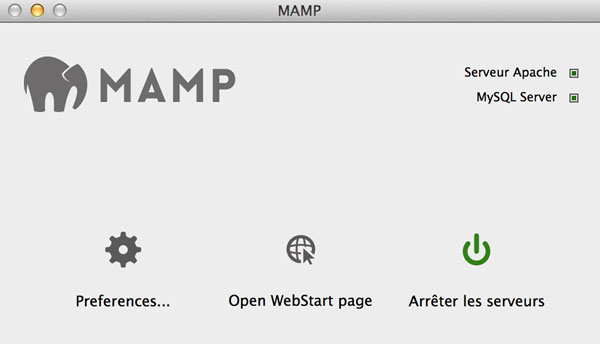
Clickez sur le bouton « Préférences » à gauche au milieu
Sur la première fenêtre, sélectionnez tout de suite le répertoire que vous avez créé précédemment et qui va devenir la racine de votre serveur web. Pour cela cliquez sur l’icone à droite de « Document Root » et naviguez jusqu’à trouver votre dossier :
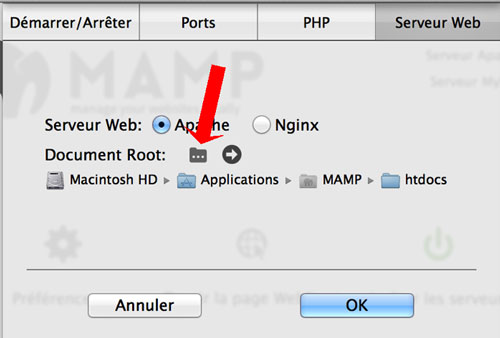
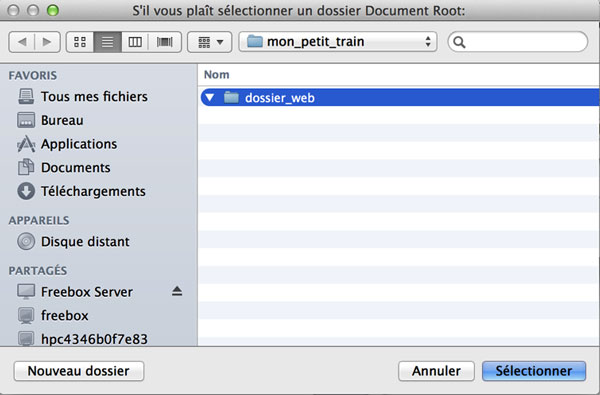
Dossier racine qui pour l’instant ne contient rien. Concernant les autres onglets en haut de la fenêtre MAMP, ne changez rien.
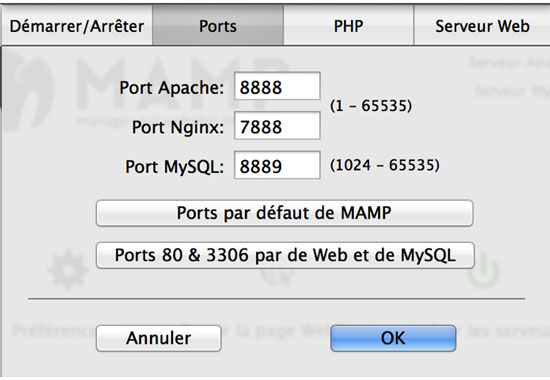
L’onglet Ports vous renseigne sur les paramétrages de ports que MAMP a programmés automatiquement. Ne changez rien. Par contre, notez que MAMP a attribué au Port Apache (c’est à dire au serveur web) le port 8888. Nous en aurons besoin par la suite.
Cliquez sur "annuler" pour sortir et vous vous retrouvez sur la fenêtre principale de MAMP que vous allez maintenant laisser travailler bien tranquillement en tâche de fond. Ne quittez pas MAMP car vous désactiveriez alors le serveur web.
Téléchargez le fichier joint :
maPageTest.html.zip que vous allez dézipper et placer dans votre répertoire web, normalement « Mes documents/mon_petit_train/dossier_web ».
Dans votre navigateur, entrez l’url :
http://localhost:8888/maPageTest.html et vous devriez voir apparaître dans la page : « Hello Locoduino ! »
Si oui, bravo, vous avez fini les paramétrages, sinon, retournez en arrière pour trouver où vous vous êtes probablement trompé.
Ca y est vous allez pouvoir maintenant piloter votre locomotive sur votre circuit. Téléchargez le fichier joint
controller_mini_dccpp.zip et placez le contenu du dossier dans votre répertoire «
Mes documents/mon_petit_train/dossier_web » puis clickez sur le lien
http://localhost:8888/controller_mini_dccpp/controller.html ou tout simplement
http://localhost:8888/Attention : Si vous avez donné à votre Arduino MEGA une autre adresse IP que 192.168.1.200:2560 vous devrez modifier la ligne 14 du fichier « controller.js » qui se trouve dans le dossier « scripts » avec un éditeur de texte et entrer votre propre adresse IP.
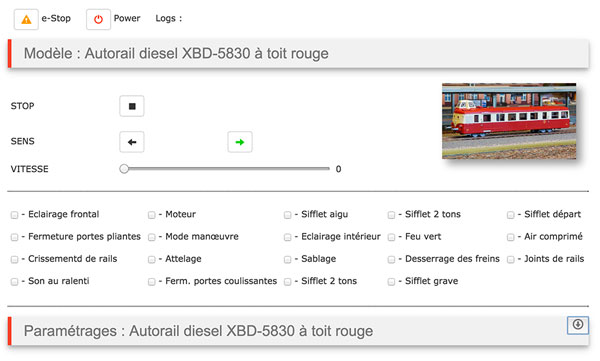
Voilà un controller assez complet que vous allez personnaliser. En cliquant sur la petite flèche à droite de la fenêtre « paramétrages », vous allez entrer l’adresse de votre locomotive et valider. Profitez pour entrer son nom ainsi que les noms des fonctions pour votre loco. L’image de la loco est dans le dossier « image », vous pouvez placer votre propre image et entrer l’url « img/ma_belle_loco.jpg ». Vous pouvez même si vous le souhaitez trouver une image sur internet et entrer son url entière :
http://www.leffondre.fr/_media/img/large/dsc-3385-rec.jpg.
Tous les CV’s peuvent être modifiés dans autres réglages. Attention cependant à ne pas entrer n’importe quoi. Au besoin, le CV 8 auquel on affecte la valeur 8 permet de retrouver les réglages usine. N’oubliez pas modifier ensuite l’adresse sur votre controller puisque
la valeur usine est 3 par défaut.
Avec ce Mini Controller, vous allez pouvoir tester DCC++ Base Station avec une locomotive. Par la suite, je développerai comment réaliser un controller pour tout un parc de locomotive en HTML 5 en utilisant le framework AngularJS. Vous verrez ainsi comment vous pourrez "jouer" à plusieurs en WIFI avec des tablettes ou des smartphones.
N’hésitez pas à me faire part de vos remarques et questions ou si vous avez besoin d'aide.
J'espère qu'avec DCC++ et votre controller web, vous connaitrez des expériences intéressantes.
Christophe.


