Bonjour à tous,
En répondre au challenge proposé sur le topic :
Projet partagé d'un gestionnaire de réseau https://forum.locoduino.org/index.php?topic=1645.0
je propose pour ma part une solution que j’ai nommée satellites autonomes.
L’ambition des satellites autonomes est d’offrir une solution de gestion de réseau simple et rapide à déployer et ne nécessitant par la suite aucune intervention particulière durant l’exploitation. Priorité est donnée au plaisir du jeu en libérant le modéliste d’opérations fastidieuse ou encore de programmation.
Principes généraux :Les satellites autonomes sont à la base des satellites Locoduino tels qu’ils ont été présentés en 2018. Ce sont des cartes qui reçoivent des commandes en entrée : commandes de mouvement d’aiguille ou de signalisation lumineuse par exemple, et qui envoient en sortie, des informations d’état concernant les équipements de réseaux sous sa responsabilité : Etat d’occupation, état des capteurs en entrée ou en sortie de canton…
Ces satellites auxquels nous avons donné la dénomination v1 sont ainsi des alliés précieux pour un gestionnaire de réseaux puisqu’ils lui apportent les informations nécessaires à la prise de décisions et en retour, exécutent les commandes demandées par ce gestionnaire.
Mais les gestionnaires de réseaux existants sont assez compliqués à programmer et cela rebute nombre d’entre nous à commencer par moi. Je parle de JMRI ou Rocrail pour les logiciels gratuits ou encore Train Controller mais il y en a beaucoup d’autres. Ce sont par ailleurs des solutions qui nécessite pour la plupart un ordinateur dédié (ou un Raspberry).
Mon travail a donc consisté à demander à chaque satellite de réaliser en plus, pour le canton qui est sous sa responsabilité, les fonctions de gestion de réseau : Sécurité et régulation des trains, commandes de ralentissement et/ou d’arrêt des locomotives, gestion de la signalisation lumineuse. J’ai donc introduit comme disent certains, une forme d’intelligence dans le système.
D’où aussi le nom de satellites autonome dans la mesure où il n’y a pas de gestionnaire centralisé.
Les objectifs :Les objectifs que je me suis fixés avec les satellites autonomes étaient :
1° - Que la phase de description du réseau, des équipements, du nommage de zones ou des cantons, le choix des cibles de signalisation soient simplifiés autant qu’il serait possible. Et je pense que sur ce point l’objectif est largement atteint, voir dépassé comme vous pourrez en juger par la suite.
2° - Que pendant l’exploitation, le modéliste soit totalement libéré des contraintes de sécurité en particulier pour pouvoir pleinement profiter du plaisir du jeu.
3° - Que le modéliste n’ait rien à écrire ou modifier dans le code des programmes. Que les programmes à télécharger sur chaque carte soient tous rigoureusement identiques. De fait, hormis le nom du réseau Wifi et son mot de passe à renseigner une fois, il n’y a rien d’autre à faire.
4° - Offrir une interface simple et intuitive pour les quelques opérations de réglage comme par exemple pour les butées des servo-moteurs d’aiguilles.
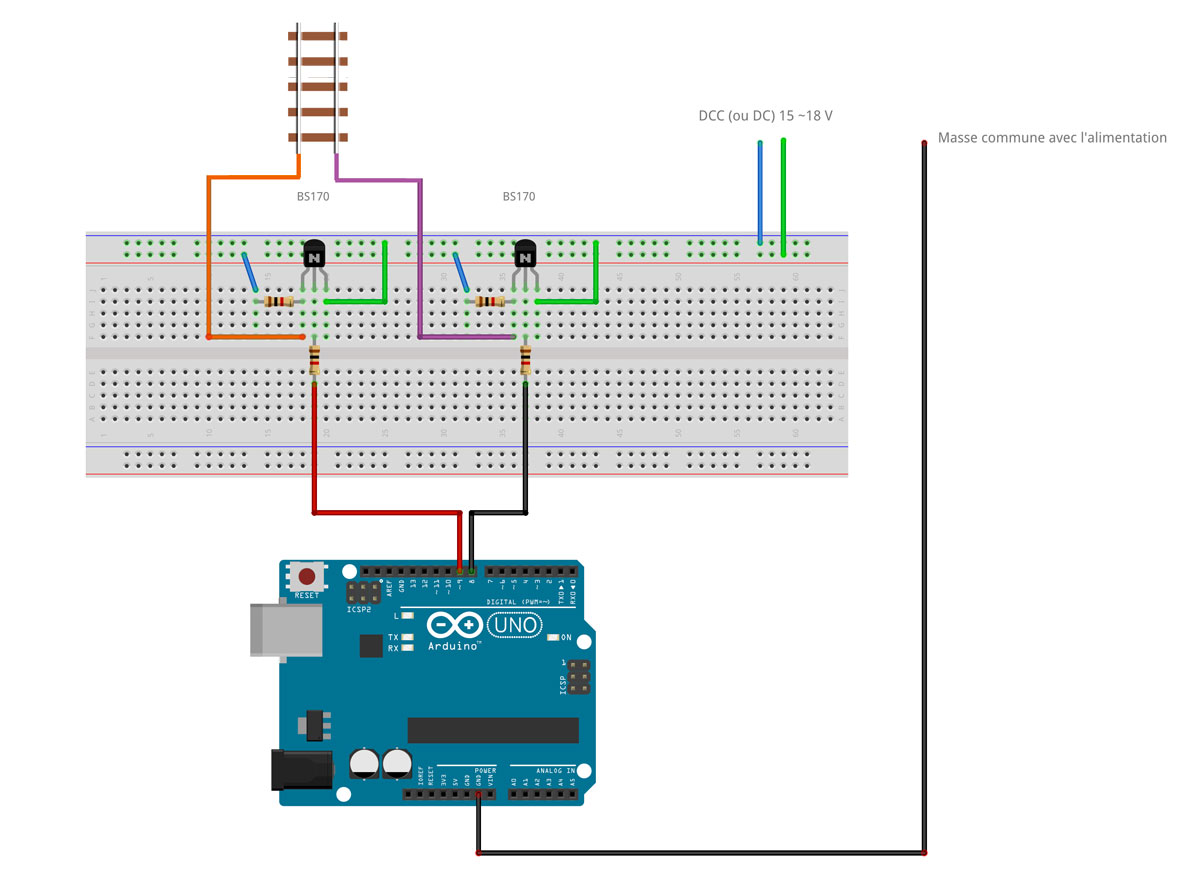
5° - Mettre en œuvre les solutions techniques privilégiés par Locoduino comme le protocole DCC (que l’on retrouve aujourd’hui dans LaBox) ou l’adoption d’un bus de communication CAN.
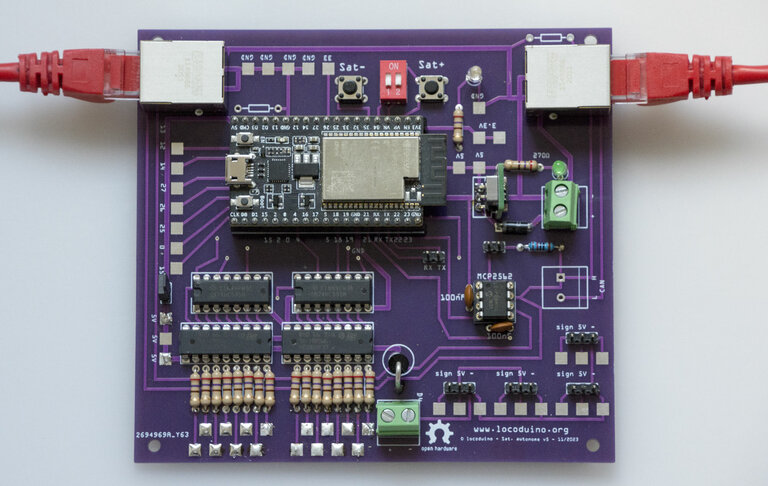
6° - Simplifier autant que cela serait possible le câblage du réseau, nombre et longueur des câbles en particulier. Cela est en partie grandement réalisé par les liaisons en RJ45 qui véhiculent le bus CAN et l'alimentation électrique.
Dans la version actuelle, les possibilités offertes sont particulièrement bien adaptées pour une mise en œuvre simple sur des petits et moyens réseaux, des dioramas, des va-et-vient sur lesquels je dirais, il n’y a qu’à poser les satellites à proximité des cantons, souder quelques fils, procéder à la reconnaissance mutuelle, régler le cas échéant les valeurs de servos moteurs d’aiguilles et c’est tout. Il est possible d’utiliser son réseau avec trois satellites pour en tester le comportement et d’ajouter un quatrième, puis un cinquième puis tous les autres. Rien de ce qui a déjà été fait n’est remis en cause.
Les satellites autonomes permettent donc de couvrir les besoins de la grande majorité des modélistes Je suis bien conscient et j’assume le fait que cela ne répondra pas par exemple aux besoins d’une vaste gare cachée avec de nombreuses aiguilles ni encore à ceux d’un grand réseau complexe.
Point important à noter : Pour rester cohérent avec mon objectif de simplification, j’ai retenu la technologie Railcom pour la détection et l’identification des locomotives. Cela nécessite donc que toutes les locomotives disposent de cette technologie. La reconnaissance par RFID est aussi incluse (mais optionnelle) mais elle ne peut pas se substituer à Railcom.
Voilà donc posés les principes généraux et la philosophie de ces satellites autonomes. Je vous présenterai par la suite les différents matériels, la mise en œuvre concrète et bien sûr, pour ceux que cela intéresse le code des programmes.
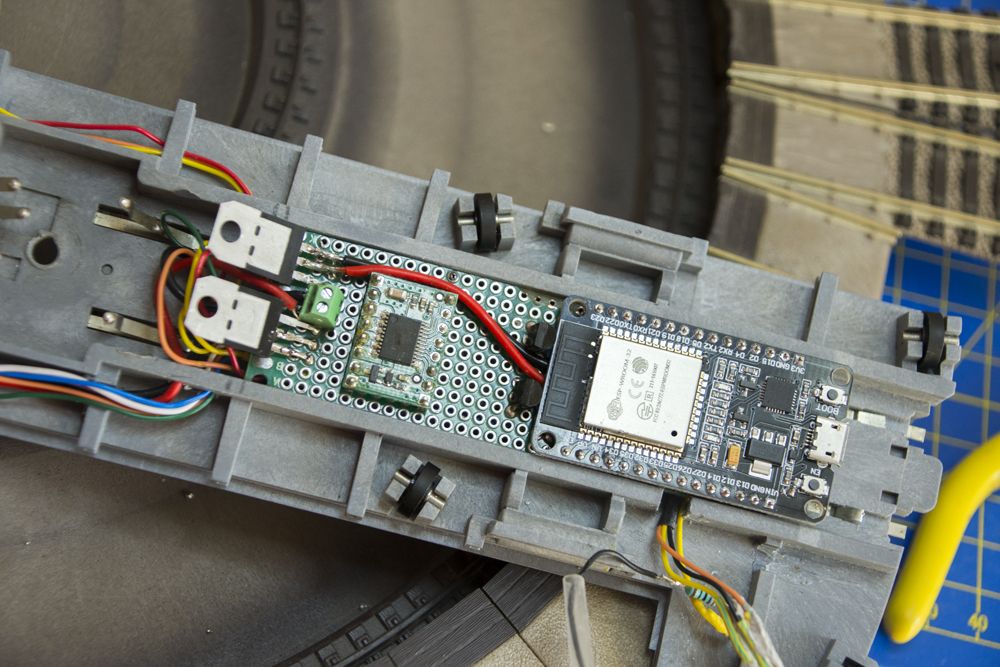
En attendant, voici ce à quoi ressemble un satellite autonome :
Je répondrai volontiers à toutes les questions que vous voudrez me poser, mais n'anticipez pas trop sur ce que je dois vous présenter par la suite.
Christophe



 Et les vaches vont à nouveau pouvoir contempler les trains.
Et les vaches vont à nouveau pouvoir contempler les trains.