91
Débuter / Re : du bon usage de la PWM...
« le: octobre 30, 2020, 05:18:23 pm »
Bonjour "Corail",
En plus de cette réponse, j'ai lu tes contributions et je te vois débuter... j'en suis à peine plus loin... mais avec une expérience et des compétences que je n'ai pas. Avec de plus un parc de locos qui me laisse pantois quand mes 28, pour ma part, me faisaient culpabiliser ! (un peu)
En revanche, je suis probablement plus avancé côté programmation et je m'efforcerai de t'aider de ce côté, éventuellement. Note juste que j'ai choisi l'analogique.
Ce que tu me réponds donc :
- quel moteur, pôles, balais...
Auparavant, autre précision importante je crois : je suis en "N". L'accès à ces informations me paraît (donc ?) bien compliqué sinon impossible, surtout sur des locos d'occasion. Mais même... est-ce que c'est indiqué dans les catalogues ? En tous cas ta question m'a fait y aller voir et, effectivement, il y a en pièces de rechange, des charbons pour moteurs "N" ! Je ne me vois pas aller y bricoler !!
Donc en clair, de quel(s) moteur(s) parle-on, je ne sais pas !
"moteurs bas en gamme"... (bas de gamme ?) je ne sais pas non plus : Fleischmann / Minitrix / Arnold ?
- FCEM :
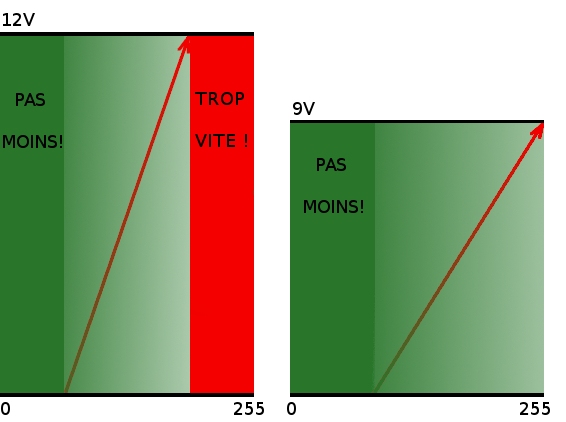
si je comprends bien tes réponses, une tension élevée sera toujours préférable, vu du moteur. Donc, pour se limiter à des vitesses raisonnables, il n'y a pas de "risque" d'être en continu pur. Aujourd'hui ma tension rails (crête) est réglée à 10V. J'ai donc intérêt à la remonter à 12 ? (voire 14... secondaire de mon transfo, transfo postérieur à 1962 ! ... mais au nominal les locos sont prévues pour du 12V ?)
Ensuite, je décroche !
Par contre je "prends" ensuite cette remarque :
Pour ce qui est du problème du décrochage (je fais appel à de vieux souvenir... c'est la notion d'angle interne ?), ne pilotant pas en digital j'y serais donc exposé ... sur mes moteurs sans balais alors que j'en suis donc gravement inconscient ?
Merci pour... toutes tes réponses, présente et à venir
Philippe
En plus de cette réponse, j'ai lu tes contributions et je te vois débuter... j'en suis à peine plus loin... mais avec une expérience et des compétences que je n'ai pas. Avec de plus un parc de locos qui me laisse pantois quand mes 28, pour ma part, me faisaient culpabiliser ! (un peu)
En revanche, je suis probablement plus avancé côté programmation et je m'efforcerai de t'aider de ce côté, éventuellement. Note juste que j'ai choisi l'analogique.
Ce que tu me réponds donc :
- quel moteur, pôles, balais...
Auparavant, autre précision importante je crois : je suis en "N". L'accès à ces informations me paraît (donc ?) bien compliqué sinon impossible, surtout sur des locos d'occasion. Mais même... est-ce que c'est indiqué dans les catalogues ? En tous cas ta question m'a fait y aller voir et, effectivement, il y a en pièces de rechange, des charbons pour moteurs "N" ! Je ne me vois pas aller y bricoler !!
Donc en clair, de quel(s) moteur(s) parle-on, je ne sais pas !
"moteurs bas en gamme"... (bas de gamme ?) je ne sais pas non plus : Fleischmann / Minitrix / Arnold ?
- FCEM :
si je comprends bien tes réponses, une tension élevée sera toujours préférable, vu du moteur. Donc, pour se limiter à des vitesses raisonnables, il n'y a pas de "risque" d'être en continu pur. Aujourd'hui ma tension rails (crête) est réglée à 10V. J'ai donc intérêt à la remonter à 12 ? (voire 14... secondaire de mon transfo, transfo postérieur à 1962 ! ... mais au nominal les locos sont prévues pour du 12V ?)
Ensuite, je décroche !
Citer
en fonctionnement analogique, une alim moteur via deux transistors (plutôt darlington) déplace la droite de charge et bride le moteur,Je ne sais pas traduire mais mes rails sont alimentés par des booster L298N, cad des ponts de MOSFET en H. Voilà ce que je sais, ce que je ne sais pas c'est si ta remarque s'applique. A priori non ? car je suis dans le cas que tu décris plus loin comme un "fonctionnement numérique ?"
Par contre je "prends" ensuite cette remarque :
Citer
FCEM: Moteur à balais: elle est générée par le moteur .. selon son régime de rotation .. indépendamment de sa tension d'alimentation,Une fois dit ça semble logique mais c'était bien de le rappeler ! Sauf que je ne sais toujours pas : balais or not balais. Mais j'ai au moins appris que ça va devenir important.
Pour ce qui est du problème du décrochage (je fais appel à de vieux souvenir... c'est la notion d'angle interne ?), ne pilotant pas en digital j'y serais donc exposé ... sur mes moteurs sans balais alors que j'en suis donc gravement inconscient ?
Merci pour... toutes tes réponses, présente et à venir
Philippe