Merci

@Pyk35 : C'est effectivement pour avoir la position absolue du pont. Quand on met sous tension un moteur pas à pas, la combinaison d'entrées que l'on va mettre va définir le home state. Les 3 autres combinaisons appliquées successivement font avancer le moteur.
Donc 1 home state tous les 4 pas.
Donc un moteur à 200 pas par tours a 50 home states et un à 400 pas, 100 home states. C'est ce que je veux détecter, le numéro du home state à l'allumage.
J'utilise un moteur pas à pas de 400 pas par tour en direct, sans réduction, avec un driver qui fait du micro-stepping (et qui a aussi un home state bien sûr) : 32 µPas par pas, soit 12800 µPas par tour. Sur un pont tournant en N, ça donne une précision de 2 * PI * 75mm / 12800 = 0,18mm. Mais je regarde aussi un autre driver de ST Micro, le STSPIN820, dont Pololu fait une break out board et qui monte 256 µPas par pas.
C'est effectivement avec un capteur IR par réflexion, les zones étamées du PCB servent de miroir. J'ai fait des essais avec le OMRON EE-SY193 mais ce capteur a un défaut : son optimum de distance est de 0,75mm et son épaisseur est de 0,95mm. Il n'est non plus facile à souder en amateur. Il faut donc que la roue soit, optimalement, à 1,7mm du PCB où sont soudés les capteur :
Or le moteur pas à pas est fixé à ce même PCB via des vis. Mais les vis à tête cylindrique ont une tête dont l'épaisseur est supérieure à 2mm

J'ai donc fraisé la carte mais je n'ai pas de fraiseuse et les précision est pas top. Du coup quand je visse le moteur, comme mes fraisages ne sont pas exactement centrés, les vis ne sont pas parfaitement alignées avec les trous de fixation du moteur et la carte est déformée

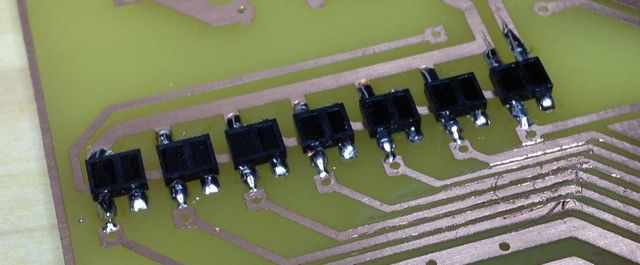
Donc j'ai trouvé ce capteur SHARP :

Il fait 2mm de haut et a une distance optimum de 3mm, ce qui laisse une place confortable pour les têtes de vis.


