Bonjour à tous,
afin d'animer un peu le site

, je vous propose un petit topo sur l'utilisation des micros-moteurs de chez AliExpress pour animer avec un maximum de précision 1 ou plusieurs barrières de PN. Depuis que j'ai découvert ces moteurs j'entrevois plein d'autres usage de ces derniers (il y a plusieurs type d'entrainement pour ces moteurs).
Tout d'abord une vidéo de démonstration du superbe mouvement de ces moteurs (je ne sais pas comment insérer la vidéo, donc voici le lien):
Voici le moteur que j'ai utilisé pour mon PN (Color: A1):
https://fr.aliexpress.com/item/1005005997644080.html?spm=a2g0o.order_list.order_list_main.11.21ef5e5bbLvfXr&gatewayAdapt=glo2fraCe moteur est un
moteur pas à pas 4 fils qui actionne une vis sans fin et son déplacement maximum est de 8 mm, ce qui est amplement suffisant pour nos barrières. Il faut environ 1500 pas pour parcourir les 8 mm et la commande se fait
au pas près, d’où la
précision de 0,005 mm par pas, qui dit mieux ?
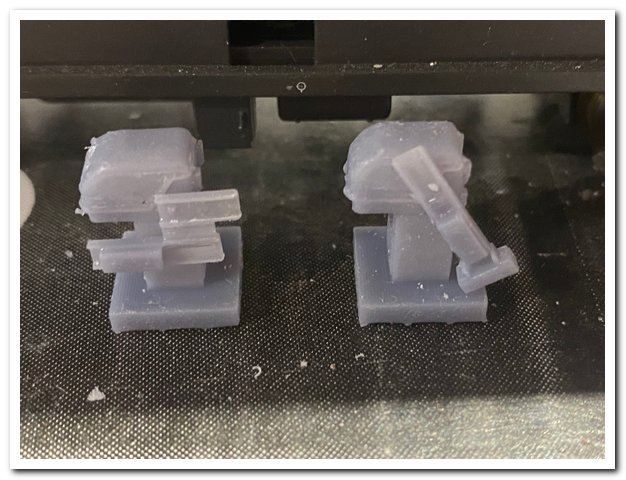
Voici 2 images du support en impression 3D sur lequel il est monté ainsi que le
petit élément en gris qui permet de fixer et régler la tige de commande de la barrière (qui va passer dans le trou du haut de l'image de droite):


Voici le moteur SNCF lui aussi imprimé en 3D:
Et le résultat final sur le réseau avec 2 doubles barrières non encore réglées, elles aussi en impression 3D:

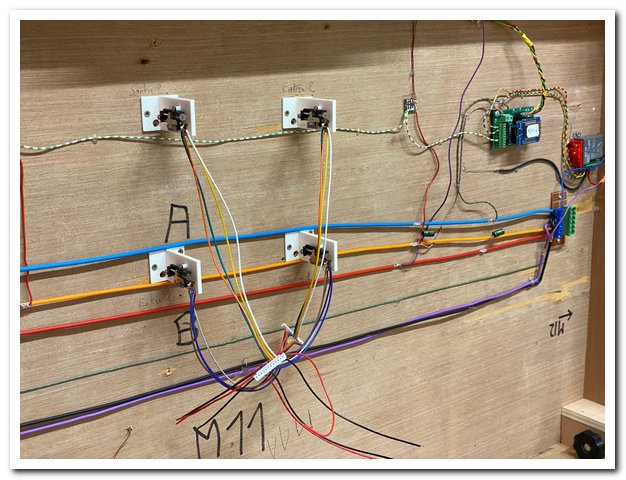
Cela se présente ainsi sous le plateau sans les cartes électroniques:
Passons à la partie qui fait souvent le plus peur dans ce genre d'installation, l'électronique de commande.
Comme pour tous les réseaux que j'équipe, je ne développe plus que des cartes équipées soit d' ESP8266 (WeMos), soit des ESP32 (plus rarement).
L'énorme avantage avec ces processeurs c'est la liaison entre eux qui se fait par
WIFI direct, un WIFI qui n'a pas besoin de box pour communiquer.
Chaque processeur a une adresse MAC unique qui le défini au sein de ce mini-réseau.
Cela
limite grandement le câblage, surtout s'il faut commander des servos pour des aiguilles et qu'ils sont disséminé sur tout le réseau.
2 fils pour l'alimentation (+/- 5V) suffisent.
Dans le cas de nos barrières, j'ai développé une carte équipée d'un WeMos qui peut directement commander 2 micros-moteurs. C'est la carte du bas sur l'image ci-dessous.
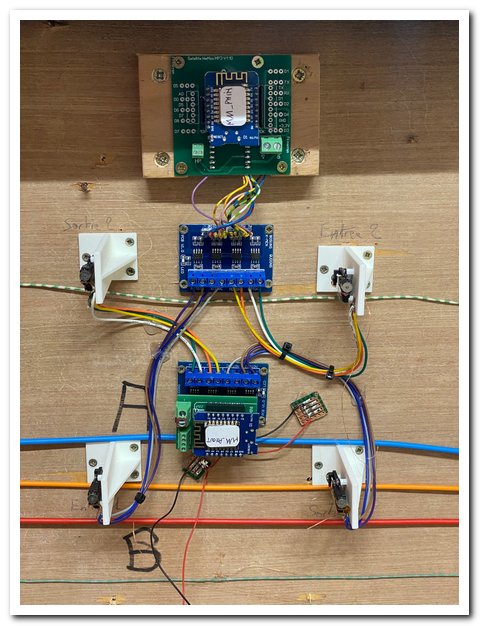
Dans le cas de notre quadruple barrières il faut donc 2 cartes.
Afin de se rapprocher au maximum de la réalité, j'ai utilisé comme seconde carte une de mes anciennes réalisation qui est équipé d'un DfPlayer, un petit lecteur de carte microSD et qui, grâce à un tout petit haut-parleur,
permet de créer toutes sortes de sons, et dans notre cas ce sera la
sonnerie bien connue de nos passages à niveau, qui va se mettre en route 8s avant la fermeture des barrières d'entrée et s'arrêter quand elles sont fermées, le
feu clignotant est également géré par une des carte.
Ce sont les 2 cartes du haut de l'image ci-dessus.
Il ne faut absolument rien d'autre pour cette installation.
En ce qui concerne le déclenchement de la fermeture ou de l'ouverture, dans le cas du réseau de ces images, ce sera une occupation ou la libération d'un canton précis qui va s'en charger.
Cette surveillance d'occupation est elle aussi faite avec une de mes cartes avec un WeMos que voici:
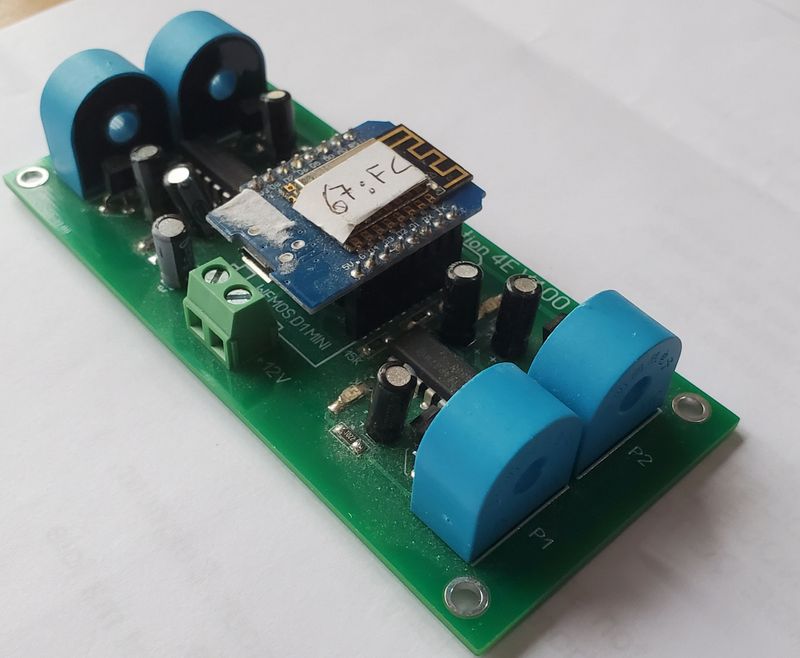
Contrairement à la grande majorité des cartes de rétro-signalisation, le principe que j'ai adopté ne crée aucune perte de tension dans les rails, la détection est faite grâce à des bobines (bleues sur l'image) dans lesquels passent les fils des cantons à surveiller.
Merci à nopxor pour son aide:
https://forum.locoduino.org/index.php?topic=489.msg4982#msg4982Dans d'autres cas ce déclenchement peut se faire soit avec des barrières optiques, soit avec des ILS, soit tout simplement par 1 bouton.
La solution finale est à trouver ensemble en fonction de votre réseau, cela pourrait même se faire par
une commande DCC venant de n'importe quel logiciel de gestion de réseau.
Si vous avez des questions, n'hésitez pas à m'écrire.
Cordialement
Antoine


