

331
Discussions ouvertes / Re : Les livres de Pascal Barlier : "ARDUINO: Faites le jouer au train"
« le: juillet 07, 2022, 10:15:15 am »
Bonjour,
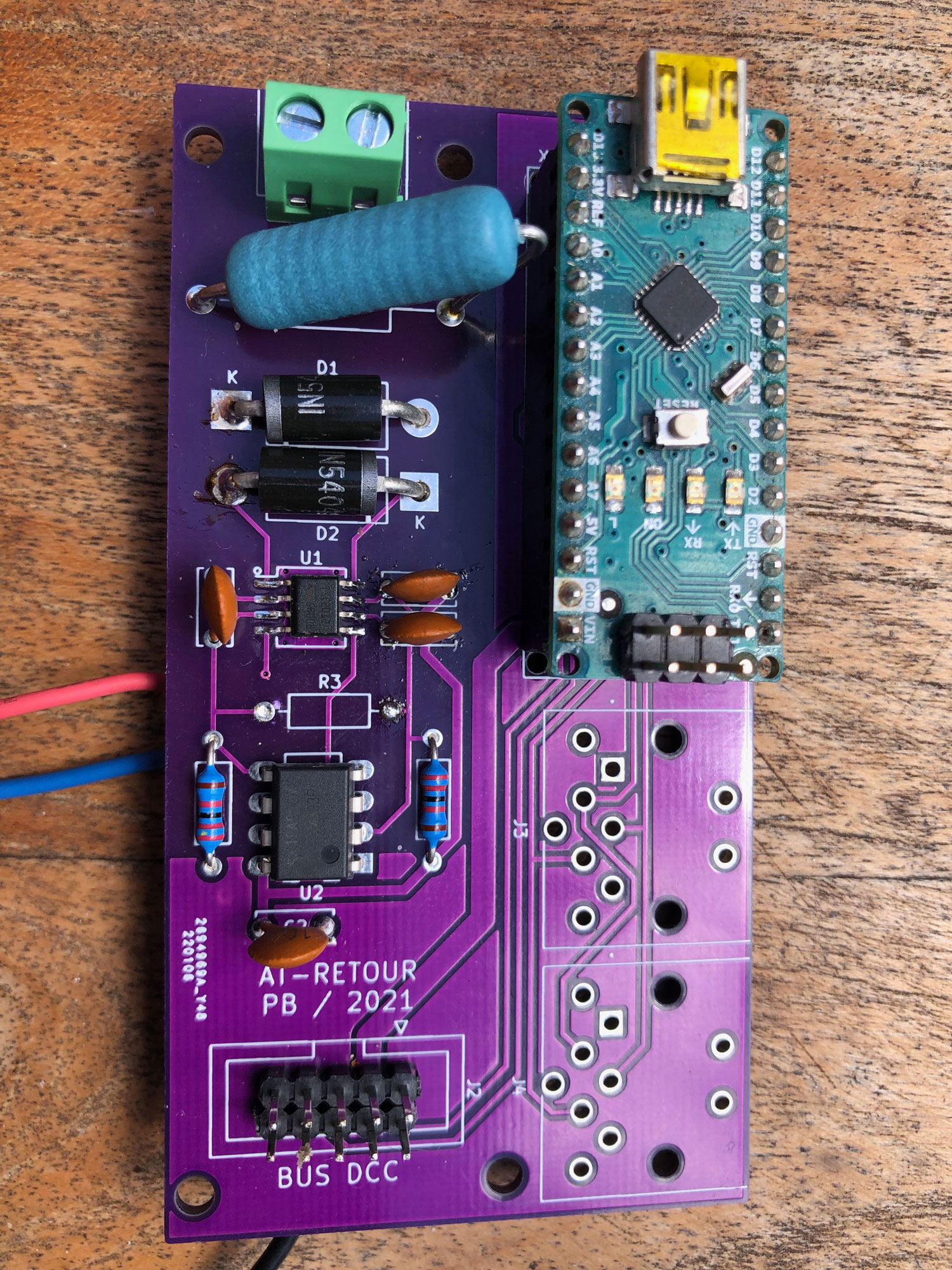
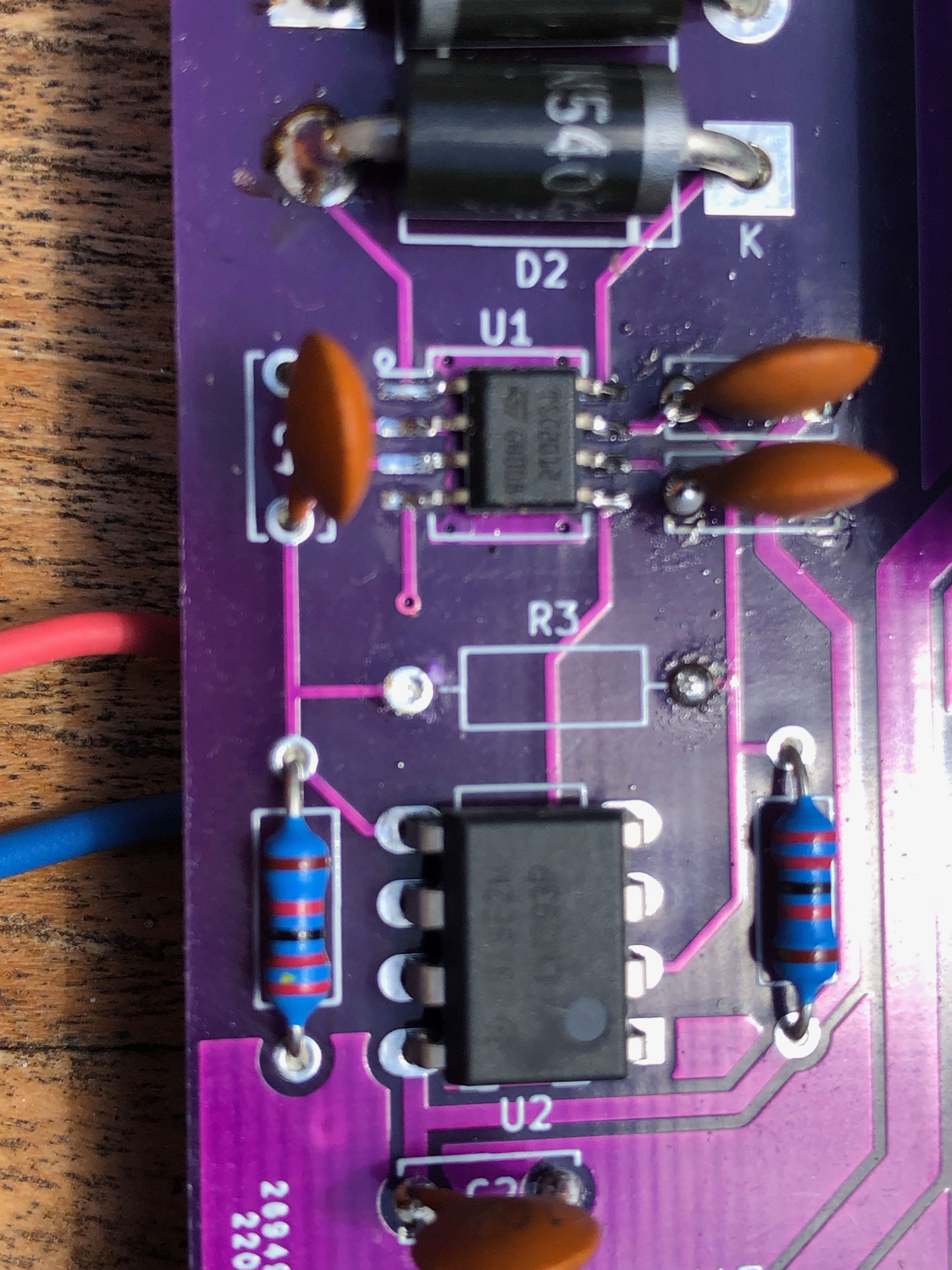
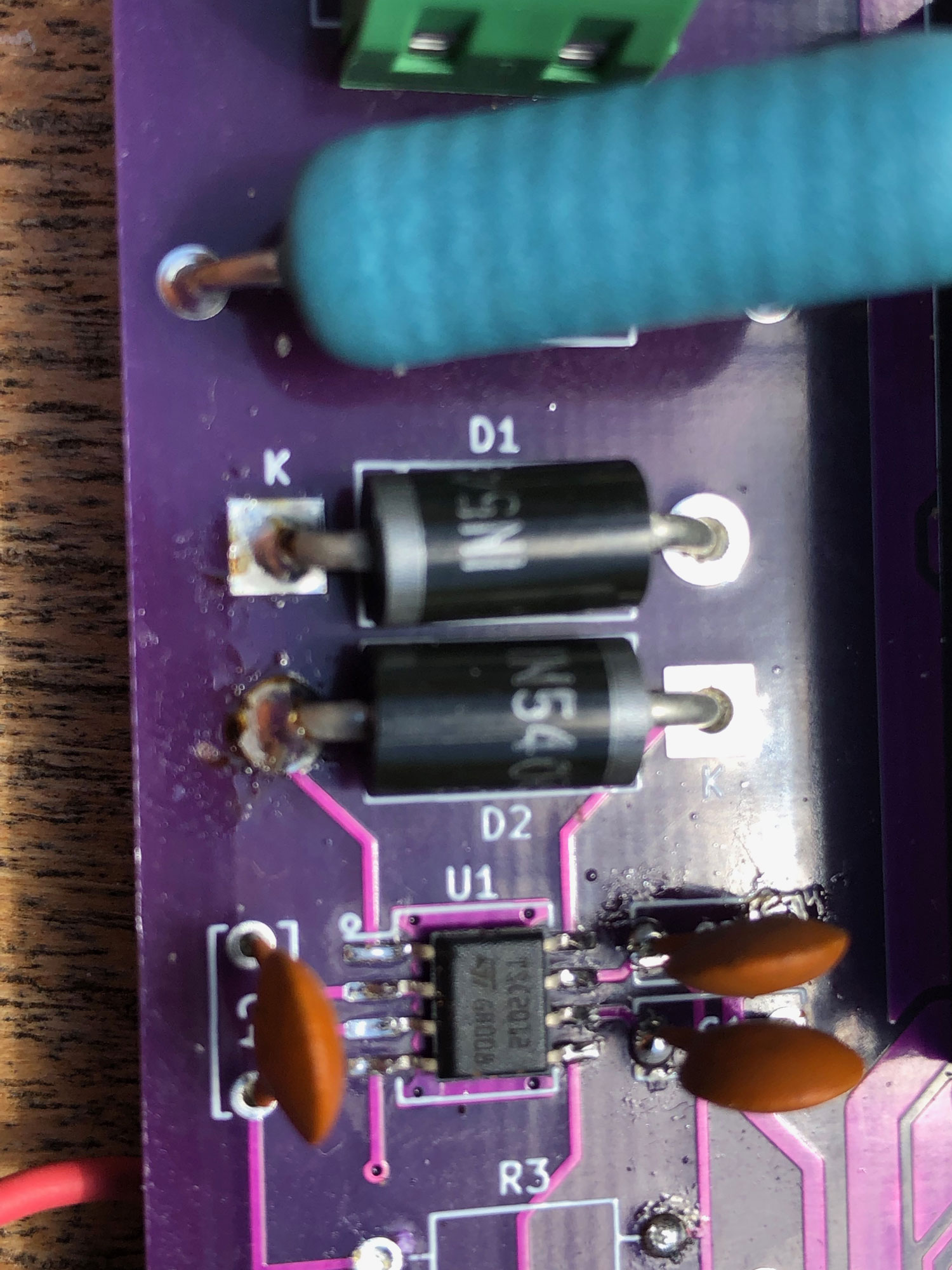
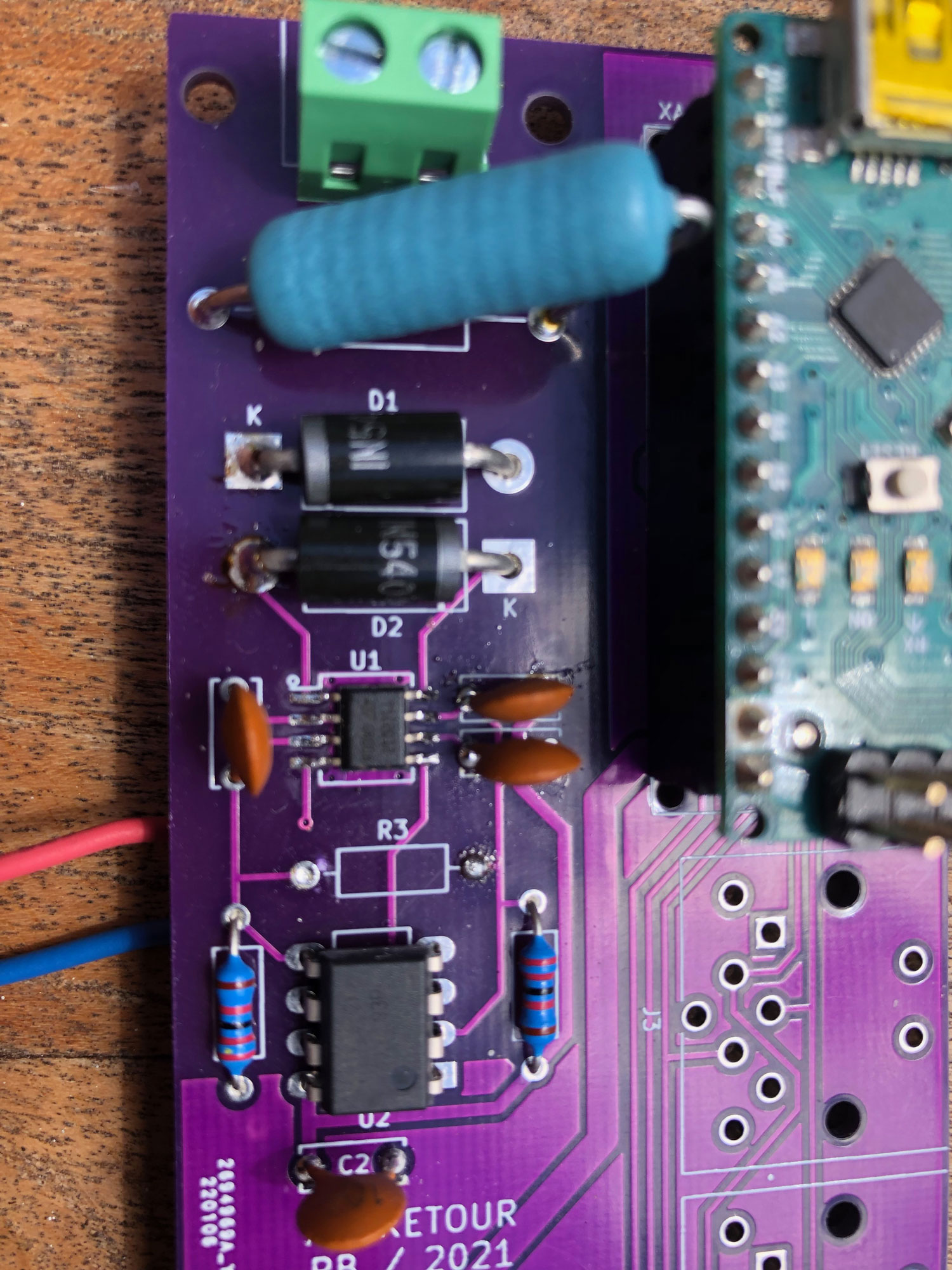
J'ai voulu reproduire la carte RailCom at-retour présentée dans le livre (V2). J'ai fait fabriquer les PCB à partir des fichiers Gerber en téléchargement donc sans modification.
J'ai utilisé exactement les composants préconisés. Je ne pense pas avoir fait d'erreur dans le montage des composants. Sauf peut-être le LM393, mais j'ai fait le montage dans un sens et dans l'autre et ça ne fonctionne pas mieux.
J'utilise un LMD18200, la tension à la sortie de l'alim est de 18V. Quand je met l'alimentation en service, j'ai bien un signal DCC sur mon rail (je n'ai qu'un seul rail pour les tests), ma loco répond, avance ou recule et ses fonctions répondent normalement.
J'ai bien sûr un signal DCC envoyé aux rails qui inclus le cutout (c'est le programme donné dans le livre), qui fonctionne parfaitement et que je présentée ici : https://forum.locoduino.org/index.php?topic=1352.0
J'ai mi une resistance variable (10KΩ) comme préconisé pour trouver la bonne valeur de résistance. (fils sur le côté)
Quelqu'un a t'il des préconisation ? Peut-être Pascal Barlier lui-même peut il m'aider ?
Merci par avance.
J'ai voulu reproduire la carte RailCom at-retour présentée dans le livre (V2). J'ai fait fabriquer les PCB à partir des fichiers Gerber en téléchargement donc sans modification.
J'ai utilisé exactement les composants préconisés. Je ne pense pas avoir fait d'erreur dans le montage des composants. Sauf peut-être le LM393, mais j'ai fait le montage dans un sens et dans l'autre et ça ne fonctionne pas mieux.
J'utilise un LMD18200, la tension à la sortie de l'alim est de 18V. Quand je met l'alimentation en service, j'ai bien un signal DCC sur mon rail (je n'ai qu'un seul rail pour les tests), ma loco répond, avance ou recule et ses fonctions répondent normalement.
J'ai bien sûr un signal DCC envoyé aux rails qui inclus le cutout (c'est le programme donné dans le livre), qui fonctionne parfaitement et que je présentée ici : https://forum.locoduino.org/index.php?topic=1352.0
J'ai mi une resistance variable (10KΩ) comme préconisé pour trouver la bonne valeur de résistance. (fils sur le côté)
Quelqu'un a t'il des préconisation ? Peut-être Pascal Barlier lui-même peut il m'aider ?
Merci par avance.
 Et les vaches vont à nouveau pouvoir contempler les trains.
Et les vaches vont à nouveau pouvoir contempler les trains.