Bonjour,
Voici le
schéma final:
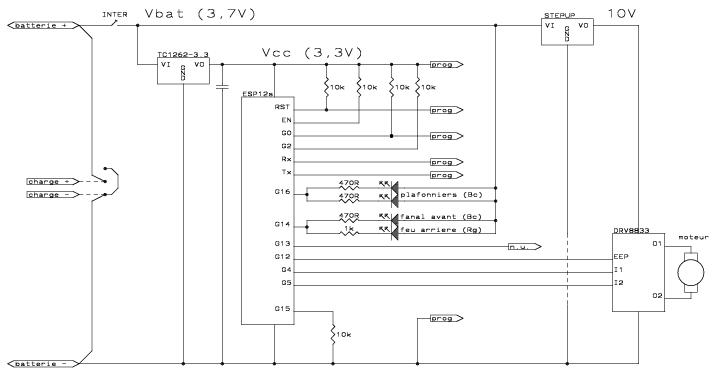
Je n'utilise qu'une partie du GPIO. G13 doit servir à connecter un avertisseur sonore si j'en trouve un assez petit.
Je ne suis pas sûr que toutes les résistances pull-up et pull-down soient indispensables, mais je n'ai pas voulu prendre
de risque, et en CMS ça ne prend pas trop de place.
Les LEDs sont connectées directement à la batterie pour soulager le régulateur.
La batterie sera rechargée en connectant simplement un chargeur externe. Je ne vise pas une autonomie très importante, et
de toutes façons il n'y aurait pas la place pour loger un système de recharge par les rails.
Voici le
circuit imprimé:

Comme il se loge sous le toit, il y a un plafonnier (LEDs blanches) de chaque coté. Les résistances sont sur l'autre face.
Le circuit de droite est le pont en H qui commande le moteur.
Quelques remarques:
1: j'ai dessiné le circuit à l'origine pour un régulateur HT7333, mais j'ai eu des problèmes avec ce composant: l'ESP12s
génère des pics de consommation très forts que le HT7333 n'arrivait pas à amortir, et ça se traduisait par des
redémarrages intempestifs. Avec un TC1262, rien de tel, mais malheureusement l'empreinte du composant est différente.
2: lorsque j'ai pris cette photo, le pont en H DRV8833 était mal connecté. Voir le schéma. Et ce n'était pas une bonne
idée non plus que de coller les deux CIs à l'araldite.
3: il y a six points de connexion (à gauche de l'ESP) qui permettent de charger le programme au départ, et de le recharger
en cas de problème avec l'OTA.
La
batterie est une 380mAh longue avec connecteur PH 2.0 incorporé. Malheureusement les dimensions indiquées ne tenaient
pas compte de ce connecteur, que j'ai du oter. Si c'était à refaire je prendrais un modèle plus puissant, et avec fils.
Le
convertisseur "step-up" est un MT3608 raccourci monté sous le châssis:

Une fois peint en noir, il pourra passer pour un réservoir ou autre comme on en voit sous les châssis.
On voit aussi sur cette photo la prise de recharge et l'interrupteur (oui, si j'avais mis les deux du même coté, ça aurait été droit!):

Le
logiciel: au démarrage l'ESP essaie de se connecter à ma box en mode station. S'il n'y arrive pas, c'est que je l'ai
emmené ailleurs, alors il démarre en mode point d'accès. L'OTA ne fonctionne qu'en mode station.
J'aime bien UDP qui est un protocole hyper simple, rapide, et bien adapté à ce genre d'application... mais qui nécessite
une appli dans le smartphone. Je n'utilise en fait qu'une toute petite partie de l'appli Z21, correspondante à mes
besoins. Je publierai le programme quand je l'aurai un peu nettoyé.
Pour commander simultanément plusieurs véhicules, j'envisageais de faire ce que suggère Gboule: un autre processeur (chez
moi, le PC qui gère le réseau) qui relaye les messages du smartphone vers les locos, chacune avec son IP. Mais le temps de
réponse serait-il au rendez-vous?
J'en reste là pour aujourd'hui. Il me reste à re-câbler l'engin avec du fil plus fin, faire des tests d'autonomie, et
surtout vérifier qu'il n'y a pas de parasite intempestif qui remettrait la solution en question.


