Ca y est c’est terminé pour l’électronique et la programmation.
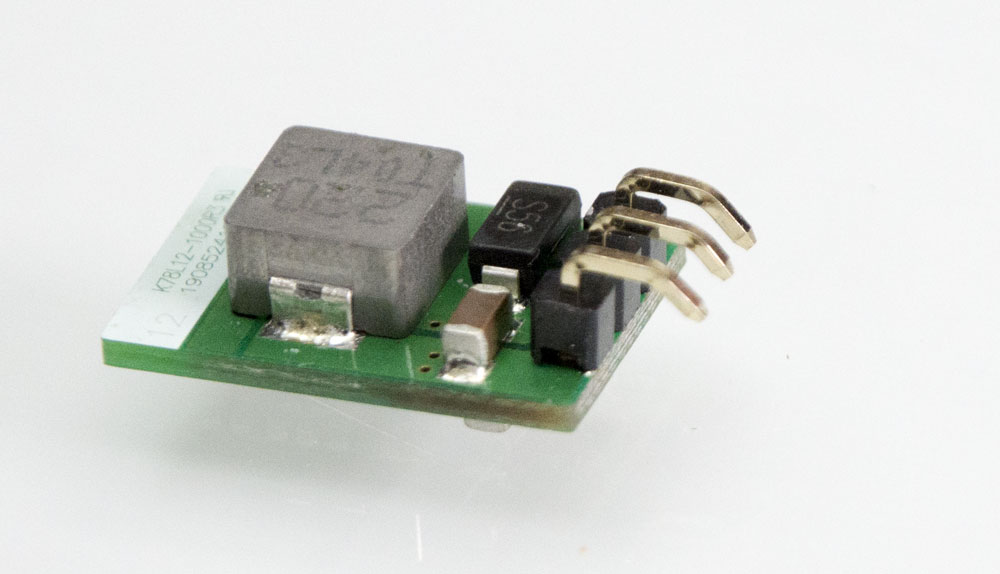
Dans la version la plus complète, on dispose du WiFi, mais aussi du CAN. L’alimentation électrique est prise sur le DCC, un pont de diode redresse le courant et deux régulateurs (12V et 3,3V) assurent l’alimentation du moteur et de l’électronique.
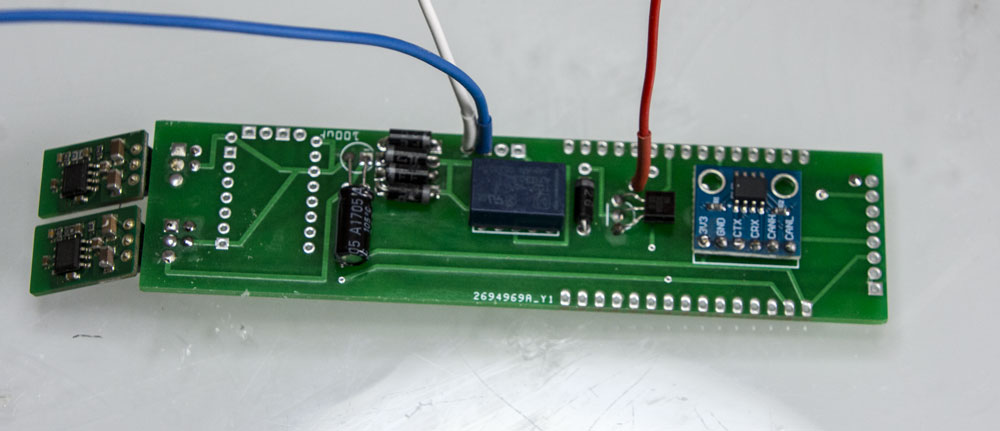
Un relais permet l’inversion de polarité sur le pont dans le cas où c’est nécessaire, quand la locomotive entre en avant et sort en avant ou entre en arrière et sort en arrière.
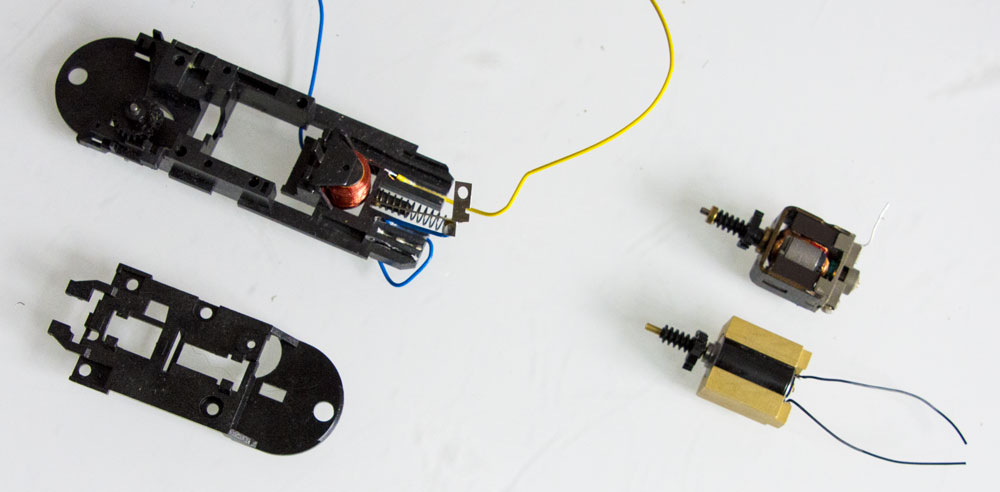
J’ai remplacé le moteur d’origine par un sb-modellbau. Le résultat est incomparable : moteur souple, silencieux et puissant. Je l’alimente même en PWM à 15 KHz pour avoir des accélérations au démarrage et des ralentis à l’arrivée.
Le nouveau moteur en bas et l’ancien en haut.
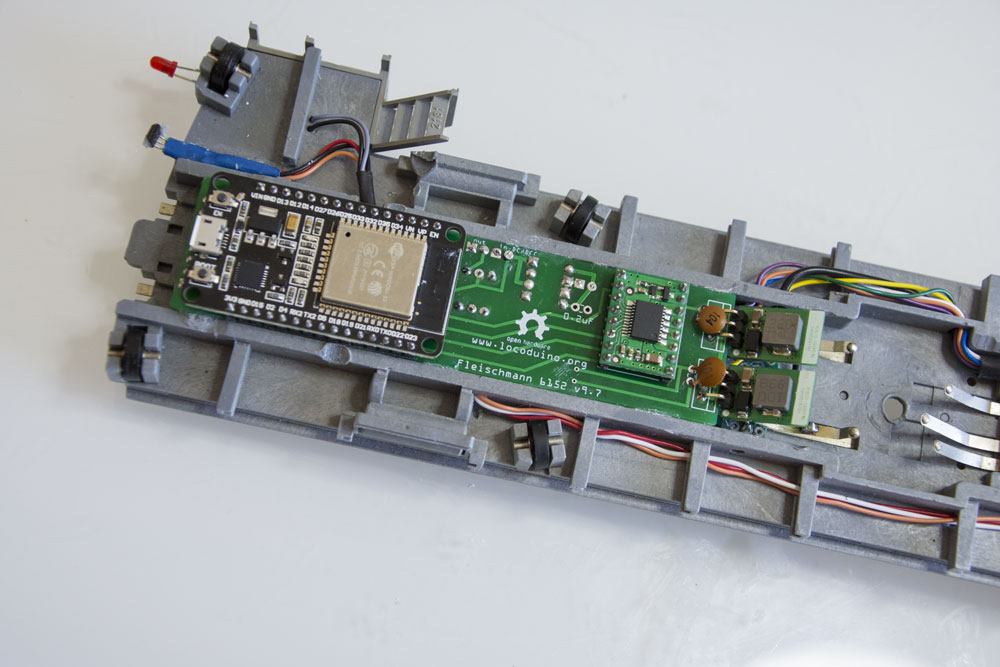
Voici l’ensemble monté sous le pont
Avec le même PCB, il est possible d’alimenter le pont, non plus avec le courant DCC mais en 15V DC pour le moteur d’origine ou en 12V DC si changement de moteur avec un sb-modellbau. Mais on ne dispose plus du bus CAN. Le changement de polarité dans les rails est aussi assuré dans ce cas.
J'ai un article en préparation qui expliquera tous ces montages. En attendant, voici une petite vidéo :


