1
Trucs & astuces / Re : Re : Commande de barrières ultra précise
« le: juin 23, 2025, 08:24:02 pm »Bon, alors ? Tu vas le faire cet article ? Je pense que je ne suis pas seul à l'attendre !
Une première question : pour commander les moteurs pas à pas bipolaires, tu utilises un pont en H ? Si oui, lequel ? De quel courant ont-ils besoin ?
Impressionné par la première vidéo, j'attends avec impatience la seconde où on verra bouger toutes les barrières du SAL4 !
Bonsoir Christian,
en fait le revenant n'était pas pour toi mais pour un pote Gérard (petitrain) à qui on doit les magnifiques décors de la photo avec le SAL4 (je ne connaissais pas ce terme).
Je ne me sens plus de taille à faire un article complet, mais je veux bien partager et répondre à toutes les questions qu'on me pose.
Par exemple pour commander le moteur j'utilise cette carte: https://fr.aliexpress.com/item/1005006158289715.html?spm=a2g0o.productlist.main.22.69e53abewYyoBM&algo_pvid=826d1487-cac2-476e-976b-f604aa448b03&algo_exp_id=826d1487-cac2-476e-976b-f604aa448b03-21&pdp_ext_f=%7B%22order%22%3A%228%22%2C%22eval%22%3A%221%22%7D&pdp_npi=4%40dis%21EUR%210.93%210.85%21%21%217.50%216.83%21%40211b613917507024495782647e8994%2112000036035145230%21sea%21FR%211738980472%21X&curPageLogUid=PPJDyww2osYY&utparam-url=scene%3Asearch%7Cquery_from%3A
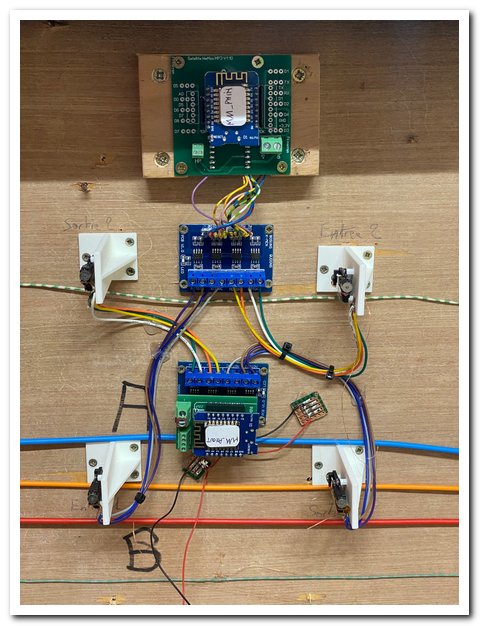
J'ai conçu un petit PCB qui s'adapte directement sur cette carte et avec les 4 ponts je commande 2 moteurs. J'ignore complètement les courants consommés par ces moteurs, il n'y a que peu d'infos sur eux.
Pour une vidéo complète il va falloir attendre la mise en place du réseau complet à Mouans-Sartoux (06) qui va se faire à partir du 30 juin, ce qui montrera beaucoup plus du talent de Gérard.
Et quand ce gros chantier sera fini, j'ai hâte de partager avec les lecteurs de Locoduino un autre projet bien plus fou qui en est au stade de la mise au point et qui utilise aussi ces micros-moteurs et encore avec l'aide de Gérard.
Alors un peu de patience

Bonne soirée
Antoine