Messages récents
Messages récents91
Vos projets / Re : Booster La Box
« Dernier message par lebelge2 le mai 19, 2025, 05:11:48 pm »LaBox avec le Booster IBT_2,
L’équipe DCC-EX propose également la carte moteur IBT_2 BTS7960 comme booster pour
EX-CommandStation (LaBox)
Voir ici, les recommandations et restrictions.
https://dcc-ex.com/reference/hardware/motorboards/IBT_2-motor-board-setup.html#gsc.tab=0
Plus par expérimentations que par nécessité, j’ai installé ce Booster sur LaBox.
Modifications de LaBox :
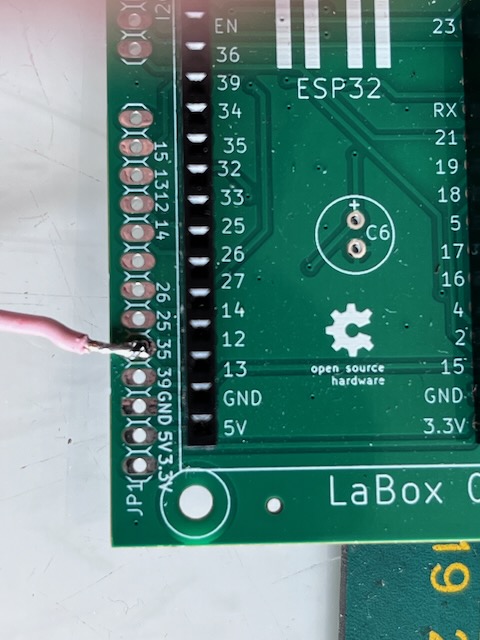
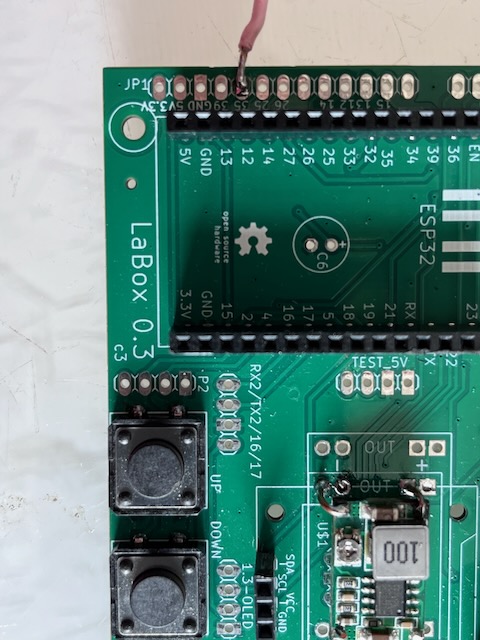
Remplacer le L6203 par 2 rangées de connecteurs (pas 3,5mm) sur deux niveaux.
12 fils relient le module IBT_2 aux connecteurs. (voir la photo.)
Avec ce module, la détection de courant pour la lecture des CV et court-circuits est beaucoup plus simple, de nombreux composants ne sont plus nécessaires et doivent être déssoudés.
Liste de composants à enlever:
IC2
R1, R2, R3, R4, R5, R10, R13, R14, R16, R17, R18, R19
C1, C2, C5, C8, C12
D1, D2, D4
Q1
Pour la détection de courant, comme proposé par l’équipe DCC-EX et suivant leur schéma, placer une résistance de 10K, une de 220 et une diode zener 3v3.
R5 ; 220 Ohms. 1/4W
R13 ; 10k. 1/4W
C8; Zener 3v3.
Relier les pins 1 et 3 de IC2.
Modifications du fichier config.h ou config.LaBox.h
Le SenceFactor passe de 0.80 à 1.6 (double) .
5000 = 5A. Courant max. dans cette exemple de configuration.
Ce paramètre est le courant maximum à 90% délivré par l’alimentation du Booster.
Suite à ces modifications, il faut aussi doubler la valeur de l’affichage du courant sur l’écran HMI.
Dans hmiConfig.h
Voilà, chez moi tout fonctionne, lecture et écriture des CV, détection RailCom, détection court-circuits, conduite des trains.
Pour bien faire, il faudrait une alimentation de 15Volts 10 Ampères.
Je reste à votre disposition pour touts renseignements complémentaires.
Bien à vous.
L’équipe DCC-EX propose également la carte moteur IBT_2 BTS7960 comme booster pour
EX-CommandStation (LaBox)
Voir ici, les recommandations et restrictions.
https://dcc-ex.com/reference/hardware/motorboards/IBT_2-motor-board-setup.html#gsc.tab=0
Plus par expérimentations que par nécessité, j’ai installé ce Booster sur LaBox.
Modifications de LaBox :
Remplacer le L6203 par 2 rangées de connecteurs (pas 3,5mm) sur deux niveaux.
12 fils relient le module IBT_2 aux connecteurs. (voir la photo.)
Avec ce module, la détection de courant pour la lecture des CV et court-circuits est beaucoup plus simple, de nombreux composants ne sont plus nécessaires et doivent être déssoudés.
Liste de composants à enlever:
IC2
R1, R2, R3, R4, R5, R10, R13, R14, R16, R17, R18, R19
C1, C2, C5, C8, C12
D1, D2, D4
Q1
Pour la détection de courant, comme proposé par l’équipe DCC-EX et suivant leur schéma, placer une résistance de 10K, une de 220 et une diode zener 3v3.
R5 ; 220 Ohms. 1/4W
R13 ; 10k. 1/4W
C8; Zener 3v3.
Relier les pins 1 et 3 de IC2.
Modifications du fichier config.h ou config.LaBox.h
Le SenceFactor passe de 0.80 à 1.6 (double) .
5000 = 5A. Courant max. dans cette exemple de configuration.
Code: [Sélectionner]
#define LABOX_MAIN_MOTOR_SHIELD F("LABOXMAIN"), \
new MotorDriver(32, 33, 27, UNUSED_PIN, 36, 1.6, 5000, UNUSED_PIN)
#define LABOX_PROG_MOTOR_SHIELD F("LABOXPROG"), \
NULL, \
new MotorDriver(32, 33, 27, UNUSED_PIN, 36, 1.6, 5000, UNUSED_PIN)
Code: [Sélectionner]
#define MAX_CURRENT 6000Ce paramètre est le courant maximum à 90% délivré par l’alimentation du Booster.
Suite à ces modifications, il faut aussi doubler la valeur de l’affichage du courant sur l’écran HMI.
Dans hmiConfig.h
Code: [Sélectionner]
#define HMI_CurrentK 1.8 (Avant 0.9) // Current scaling coefficientVoilà, chez moi tout fonctionne, lecture et écriture des CV, détection RailCom, détection court-circuits, conduite des trains.
Pour bien faire, il faudrait une alimentation de 15Volts 10 Ampères.
Je reste à votre disposition pour touts renseignements complémentaires.
Bien à vous.