Merci les Amis !
J’ai encore plein de choses à faire donc il y aura des suites 
Que le temps passe vite

Dans ce sujet, il n'est question que de mon réseau.
Merci de ne pas poser de questions relatives à votre propre projet, il est simple de créer votre propre sujet.
Bon, je vais essayer de décrire la partie GESTIONNAIRE du réseau : gros morceau qui se fera par petits bouts.
Mais auparavant il faut se rappeler l'architecture globale du réseau :
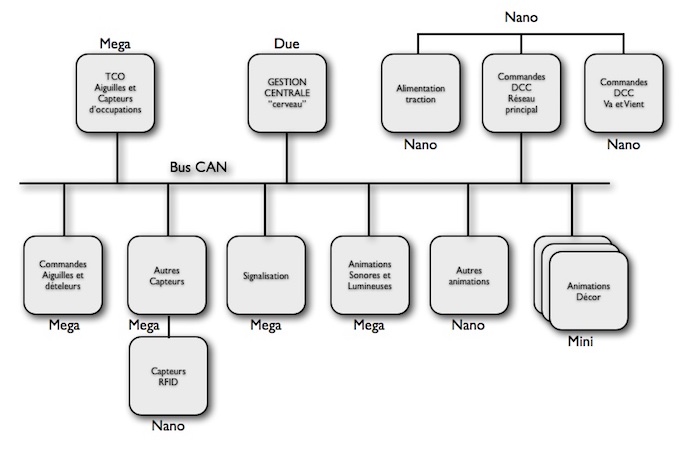
L'idée simple que j'ai suivi depuis le début
et qui marche toujours est que tous les modules communiquent entre eux sur un bus CAN.
Ainsi, chaque module est développé indépendamment des autres et sa mise à jour éventuelle est aussi indépendante.
A cette époque je ne connaissais pas l'ESP32 et le wifi : je n'ai donc pas hésité. Toutefois le bus CAN est tellement pratique (il y en a dans toutes les voitures et les avions, ce n'est pas par Hazard). Je ne remercierai jamais assez Jean-Luc qui m'a présenté cette technologie.
Pour que tous ces modules échangent entre eux des messages qui signifient des événements sur le réseau, j'ai conçu un protocole personnel, le plus simple possible avec comme intention de ne rien changer pour éviter de modifier tous les modules en cas de changement. Ce qui ne m'empêche pas d'ajouter des nouveaux modules avec de nouveaux messages.
Je vais donc présenter les messages CAN qui concernent chaque module, ce qui permettra de comprendre facilement comment ça marche.
Petit rappel sur les messages CAN :
On relira si nécessaire l'article de base : Mise en oeuvre du Bus CAN entre modules Arduino (1)
https://www.locoduino.org/spip.php?article130Chaque message est contient un identifiant Id et jusqu'à 8 octets de données
L'identifiant Id est unique. Il définit qui l'envoie (un seul émetteur car pas de doublons qui se promènent sur le réseau) et ce qu'il contient (ce qui est décrit dans le protocole CAN exposé par la suite.
Les octets suivants contiennent les détails du message. Parfois je n'en utilise qu'un seul, parfois plus. C'est aussi décrit dans le protocole.


