Bonjour à tous,
Voici une présentation de ce que nous envisageons de présenter au :
- SALON INTERNATIONAL DU TRAIN MINIATURE à Orléans : 10 et 11 novembre 2018Nous comptons sur un espace de 6m x 3m environ.
Dans cet espace nous espérons pouvoir disposer de 2 plateaux de 240 x 125 cms sur lesquels seront présentés plusieurs choses :
-
Le Locoduinodrome basé sur le Locodrome décrit par Pierre59 dans son article 184 (
http://www.locoduino.org/spip.php?article184) et qui sera animé par 3 centrales DCC (bobyAndCo, Thierry et Dominique), 2 gestionnaires de réseau (Pierre59 et bobyAndCo), 3 TCO (Pierre59, bobyAndCo et Jean-Luc), des
Satellites d’interface avec les capteurs de rétrosignalisation, les commande des signaux et des aiguilles, le tout relié en bus CAN. Evidemment tout ne sera pas forcément mis en service simultanément.
-
Le va et vient (Dominique), objet de l’article 232 (
http://www.locoduino.org/spip.php?article232)
- Des démonstrateurs de Christian, de Thierry, peut-être de Catplus, etc..
- Une machine à découper de Pierre Graftieaux et ce qu’elle permet de faire en modélisme ferroviaire
Le schéma ci-dessous regroupe en partie ces éléments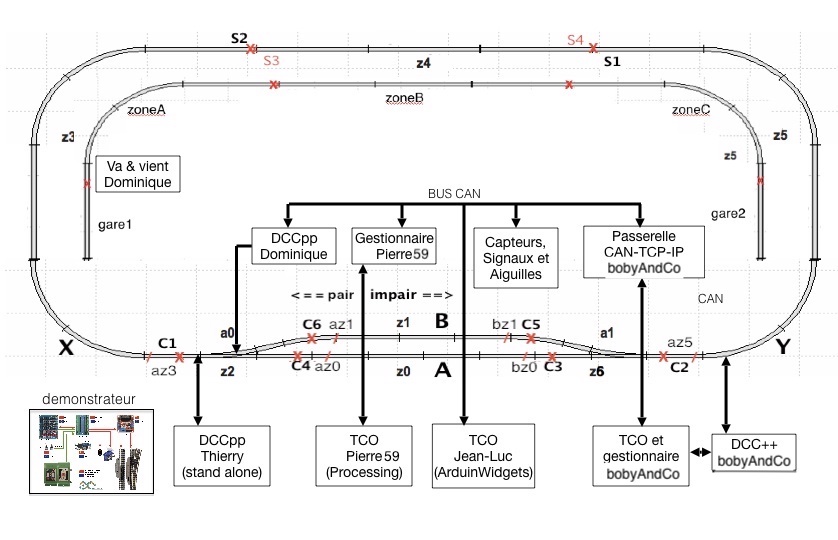
En ce qui concerne
Le locoduinodrome en format HO, c’est un réseau en ovale avec une gare comportant 2 aiguilles et une voie de dérivation. il comprend :
-
7 zones (z0 et z1 dans la gare), la zone d’aiguille z2 de la gare coté pair, puis successivement les zones z3, z4, z5 et la zone d’aiguille z6 de la gare coté impair. Il est prévu d’y faire rouler 2 trains, soit dans le même sens (avec protection par cantonnement et BAL), soit dans des sens contraires (avec autorisation et attente en gare d’un train quand l’autre circule), le tout sous le contrôle d’un gestionnaire.
- 3 cantons (cela peut être 5 si les carrés font aussi le BAL avec éventuellement des itinéraires permanents), correspondant aux zones z3, z4 et z5.
- Les 7 zones seront équipées respectivement de
7 détecteurs de consommation pour détecter la présence des trains et le suivi des trains par le gestionnaire. Les croix rouges représentent les points de coupures des rails. Elle seront aussi équipées de détecteurs ponctuels pour faciliter les arrêts précis devant les signaux.
-
2 aiguilles a0 et a1.
- Il y aura
10 signaux qui seront :
- 2 carrés avec RR : C1, C2 coté pointes des aiguilles a0 et a1
- 4 carrés C3, C4, C5, C6 aux extrémités des zones z0 et z1
- 4 sémaphores S1, S2, S3 et S4 (dont 2 avec Ralentissement)
- Les arrêts précis devant les carrés seront obtenus grâce à
10 détecteurs ponctuels : az0 et bz0 dans la zone z0, az1 et bz1 dans la zone z1, az3 dans la zone z3 et az5 dans la zone z5 et 4 autres devant les sémaphores S1 à S4 (non représentés).
- Les capteurs de consommation (7), les capteurs ponctuels (10), les signaux (10) et les aiguilles (2) seront gérés par une série de
cartes Satellites connecté à un bus CAN à 250 kb/s. Ces cartes émettront des messages CAN à chaque événements d’occupation/libération, de détection ponctuelle et recevront des messages de commande des signaux et des aiguilles.
- Les signaux seront constitués de
simples cibles SNCF percée avec des leds rouge+jaune+verte +blanche (pour l'oeilleton) et disposées vers le public pour une visibilité maximum. Elles seront plus grandes que l’échelle HO.
Les
satellites sont représentés sur ce schéma :

- Les messages CAN événements et commandes seront exploités :
- soit par le
Gestionnaire en C++ de Pierre59 (article 184) qui sera installé dans une carte Arduino Mega connecté au bus CAN
- soit par le
Gestionnaire en TCP-IP de bobyAndCo résidant dans son MacBook, via une passerelle CAN/TCP-IP réalisée par Christophe dans une carte Arduino Mega reliée au bus CAN.
- soit par la
tablette tactile de Jean-Luc.
- Il y aura 3 types de TCO sur le Locoduinodrome :
- Le
TCO en Processing de Pierre59 sur PC/Mac/tablette connecté directement en USB/Série sur l’
Arduino Mega Gestionnaire de Pierre59.
- Le
TCO sur Mac (de bobyAndCo (base de donnée et gestionnaire) connecté au bus CAN (via la
passerelle Can/TCP) et à sa centrale DCC++.
- Le
TCO sur tablette tactile de Jean-Luc connecté directement au bus CAN.
- Une 3ème centrale DCC sera connectée directement au réseau :
la centrale DCCpp (ou DcDCCNanoControler) de Thierry (celle qui est en photo dans LR de janvier 2018).
Tout ceci sera réalisé et présenté par ceux qui pourrons s'y rendre, c'est même en cours de conception depuis quelques semaines. Mais nous ne ferons que ce qui sera possible selon les possibilités de chacun. Nous n'avons pas prévu de succomber au stress des salons ! Au contraire, nous ne faisons cela que pour le plaisir. Les noms des éléments présentés seront probablement différents dans les messages à venir (d'ailleurs ça change déjà entre la 1ère et la 2ème figure de ce message !).
Accrochez-vous

le train va partir


Amicalement
Dominique


