
1231
Shields et Modules / Re : Carte Servomoteurs DCC + CAN
« le: janvier 29, 2016, 10:09:23 am »
En fait non. ElectroDragon a remboursé ma commande. En effet c'est le nouvel an chinois et la fab ne rouvre que le 12 ou 13 février.

Le forum LOCODUINO est consacré aux discussions ayant trait à l'utilisation de l'Arduino dans les automatismes et les animations pour le train miniature. Nous avons eu récemment quelques inscriptions de personnes ayant des projets plus généraux mais surtout inapplicables au train miniature. Si votre projet ou vos questions ne concernent pas le modélisme ferroviaire, ne vous inscrivez pas, vous perdriez votre temps et nous aussi.
Cette section vous permet de consulter les contributions (messages, sujets et fichiers joints) d'un utilisateur. Vous ne pourrez voir que les contributions des zones auxquelles vous avez accès.

Pour la mémoire, super site, je vais le visiter plus en détail.
Enfin, concernant la mémorisation des positions des servos en cas de coupure de courant, j'ai prévu un monitoring des tensions par les entrées analogiques de l'Arduino. Qu'en penses-tu?

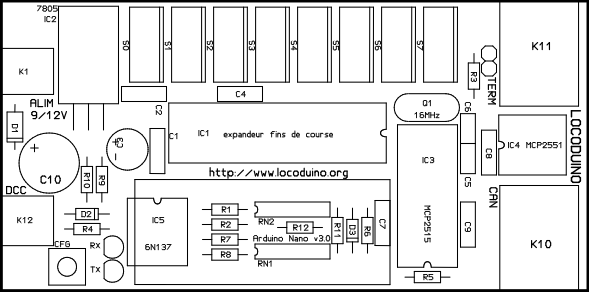
J'en ai commandé une pour voir : le quartz est à 8Mhz et d'emblée elle ne communique pas avec les cartes Locoduino.
J'ai changé le quartz pour un 16 MHz et maintenant elle marche impeccablement !
Beaucoup de questions, mais je vais essayer d'y répondre le mieux possible:
- La coupure de l'alimentation des servos n'est pas seulement faite pour limiter la consommation globale, ni celle en butée (bien que cela soit ainsi traité) mais pour éviter tout mouvement intempestif des servos lors d'une mise sous tension. En effet, lorsque l'on met en route, j'ai observé que certains servos partaient en butée avant de revenir sur la plage autorisée. Dans le modélisme à l'échelle N, on ne peut pas accepter qu'un servo aille en butée, sinon on a de la casse. J'ai vérifié qu'un délai entre la mise sous tension de la carte micro et des servos résolvait de manière sûre ce problème.
- L'EEPROM est utilisée pour pouvoir mémoriser les positions de butée et les positions de chaque servos afin de sécuriser les mises en route et arrêt. J'ai mis une mémoire externe car ce type de mémoire ne supporte que quelques dizaine de milliers d'écriture, ce qui fait que l'on ne jette pas le micro tous les deux ans, seulement un boitier à 1 Euros sur support. Mais chacun son option!
De ton côté, où en es-tu de ton projet?