871
Présentez vous ! / Re : Bonjour, J'ai décidé de me lancer dans la réalisation d'un train miniature HO
« le: mars 13, 2019, 09:42:11 pm »
Bonjour,
Bienvenue parmi nous.
J'avais déjà vu la centrale d'Ulysse dont tu parles. Je trouve cela bien compliqué.
J'ai le sentiment que les solutions que l'on a développé autour de DCC++ sont plus simples et en tous les cas largement éprouvées par de nombreux membres de Locoduino. Pour le hard, voir cet article : http://www.locoduino.org/spip.php?article187
Une solution simple pour commencer avec un UNO, un LMD18200 me semble un bon choix et peu couteux.
Si tu ne veux pas trop t'aventurer en informatique, tu pourra te rapprocher des membres qui utilisent JMRI (open source donc gratuit). Si non, il y a plusieurs solutions de centrales.
Tony propose une souris sans fil : http://www.locoduino.org/spip.php?article237#forum3555
Moi-même, je propose une solution simple en informatique : http://www.locoduino.org/spip.php?article185
et quelques autres plus complètes mais qui demandent plus de compétences en informatique : http://www.locoduino.org/spip.php?article230
Avec ce système tu peux utiliser des tablettes et des smartphones.
Tu peux déjà prendre du temps pour parcourir le site et poser toutes tes questions pour que l'on essaye de t'aider.
Christophe
Bienvenue parmi nous.
J'avais déjà vu la centrale d'Ulysse dont tu parles. Je trouve cela bien compliqué.
J'ai le sentiment que les solutions que l'on a développé autour de DCC++ sont plus simples et en tous les cas largement éprouvées par de nombreux membres de Locoduino. Pour le hard, voir cet article : http://www.locoduino.org/spip.php?article187
Une solution simple pour commencer avec un UNO, un LMD18200 me semble un bon choix et peu couteux.
Si tu ne veux pas trop t'aventurer en informatique, tu pourra te rapprocher des membres qui utilisent JMRI (open source donc gratuit). Si non, il y a plusieurs solutions de centrales.
Tony propose une souris sans fil : http://www.locoduino.org/spip.php?article237#forum3555
Moi-même, je propose une solution simple en informatique : http://www.locoduino.org/spip.php?article185
et quelques autres plus complètes mais qui demandent plus de compétences en informatique : http://www.locoduino.org/spip.php?article230
Avec ce système tu peux utiliser des tablettes et des smartphones.
Tu peux déjà prendre du temps pour parcourir le site et poser toutes tes questions pour que l'on essaye de t'aider.
Christophe
 :
:
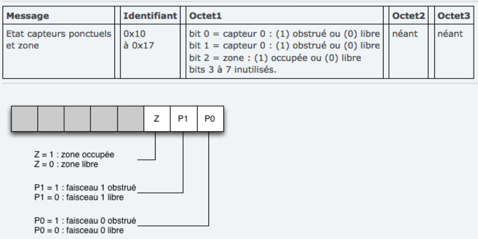
 Tu peux me donner la référence de la norme ?
Tu peux me donner la référence de la norme ?